Controlling Power Wheelchairs for Mobility Impaired Persons
Christoph Dobler
Publication:
- Christoph Dobler,
µ-Force Control - A Device for Controlling Power Wheelchairs for Severely Mobility Impaired Persons, 46. Jahrestagung der Gesellschaft für Informatik, Informatik 2016, Informatik von Menschen für Menschen, Lecture Notes in Informatics, pp. 2127-2132, Gesellschaft für Informatik, Klagenfurt, Austria, September 26-30, 2016.
All publications are available from Publications.
Summary
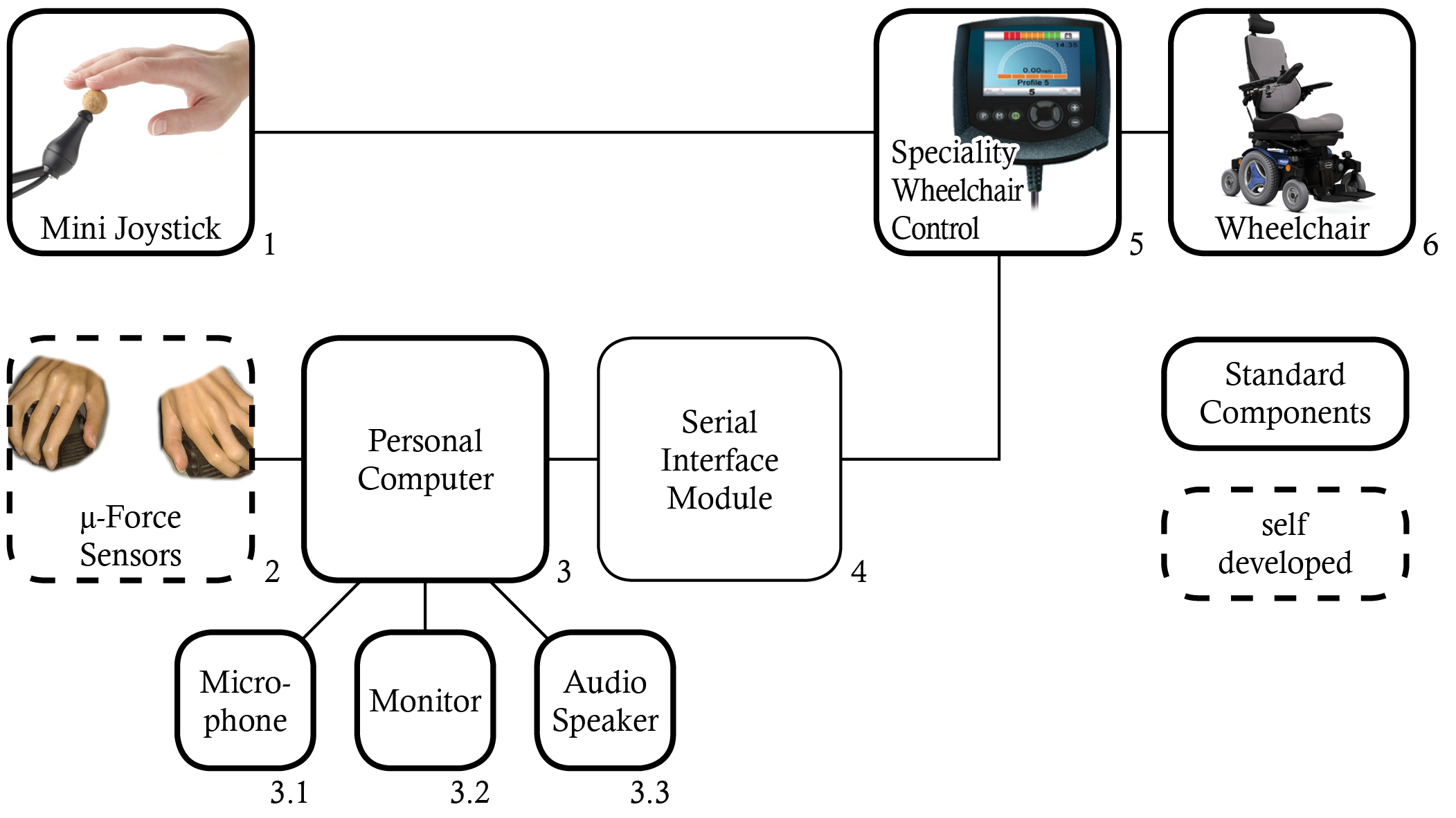
A new device for the control of power wheelchairs has been developed. Besides a speech recognition module its main component consists in two force sensors, shaped to match the hands of the user. The sensors are able to measure slightest pressures executed by the thumbs. Often mobility impaired persons are able to control a power wheelchair via a joystick. This requires the ability to execute distinct movements of the fingers or hands. However, in the case of more severe impairments, the possibility of wheelchair control via a joystick might not exist. Such persons in mind, a concept has been developed in which minimal muscular forces suffice to control a power wheelchair. A prototype of the device called µ-Force Control has been constructed that measures and combines the pressures from both thumbs and translates them to direction and speed of the wheelchair. It has been tested under reality conditions in various indoor and outdoor scenarios.
µ-Force Control keeps the ability of driving power wheelchairs even with a very small residual muscle strength. Furthermore, the fingers do not have to be moved in contrast to interactions with a mini-joystick, which usually needs a force of 10 grams and the ability to move the thumb and the pointer finger in a small radius of approximately 5-10 mm.
Interaction
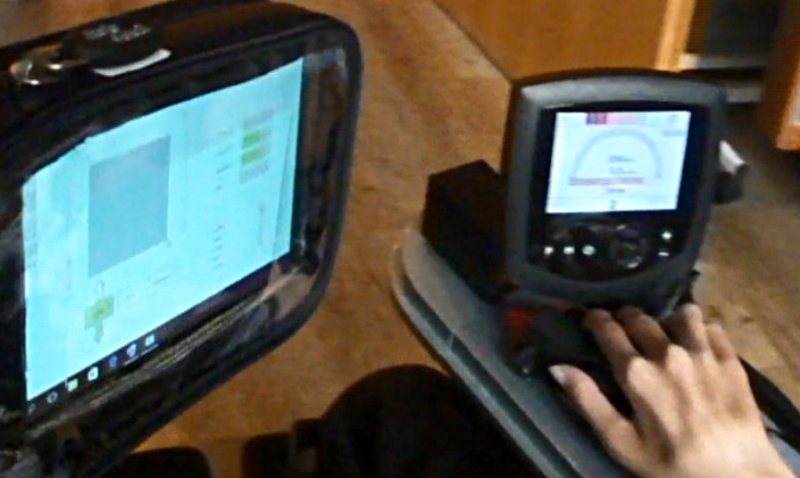
Pressing the left thumb turns the wheelchair right and vice versa. A light pressure with both thumbs selects the driving direction forward or backward. Pressing both thumbs with a slightly stronger pressure accelerates the wheelchair in the current direction. However, controlling the wheelchair solely based on the pressure of the finger is not accurate enough. Therefore, a small USB screen is used to provide a visual feedback. With the help of visual feedback through the driving vector, a suitable coordination of the pressure of both thumbs is possible. Additionally, auditive feedback is emitted via speaker. This is done for important events, e.g., when the driving direction is changed or if a connected device (microphone, force sensors, etc.) loses connection.
Graphical User Interface
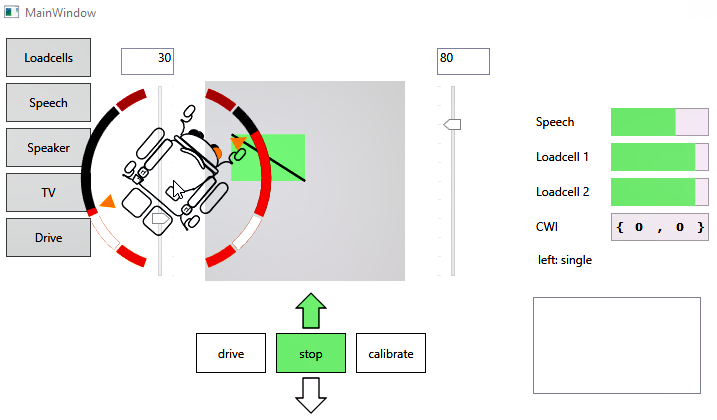
The graphical user interface can be controlled via speech recognition. For example, the sliders on the left and right of the gray area show the measured force of the sensors. The driving vector shown in this box (black line in green rectangle) is calculated from these two values. If a stop command is activated via speech, no further control commands will be send to the wheelchair. Instead, the force values will be used to control the mouse on the screen.
Evaluation

The author of this work suffers from Duchenne muscular dystrophy (DMD) and has developed the described prototype according to his own needs. DMD belongs to a group of inherited diseases that are characterized by progressive weakness and loss of muscle tissue. In a period of continuous developing and testing he was able to operate the prototype in various indoor and outdoor scenarios under realtime conditions such as rooms in the author's home, at work in an office, in shopping malls, in restaurants, cafes, and cinemas, in elevators of public buildings, as well as in outdoor scenarios such as passing through a meadow, driving onto the ramp of a car loading system, covering shorter distances on cobblestone and larger distances on paved roads. Though a systematic evaluation remains to be done there is already ample evidence, that the prototype of µ-Force Control represents a significant relief in the everyday life of severely mobility impaired persons.
Conclusion

Mobility is essential for handicapped people. It allows them to take part in social life. A power wheelchair is an important tool to provide handicapped people with some autonomy. The proposed control device for power wheelchairs offers much flexibility, as it utilizes standard computer components. Furthermore, the driving algorithm can be adapted to meet special user demands and the application can be extended with an eye tracking component. It has proven to enhance mobility in various indoor and outdoor scenarios and thus to improve participation in social life.
At SKILL 2016 in Klagenfurt

Images: Human-Computer Interaction
Downloads:
- Research Report 2010-2013 (PDF 2 MB)
- Forschungsbericht 2010-2013 (PDF 2 MB)
- Lehrbericht 2010-2022 (PDF 12 MB)
